

14
2023
--
08
Micro y nanorrobótica aplicada al transporte dirigido de células madre
Con el rápido desarrollo de la tecnología robótica, los robots se utilizan cada vez más en la vida diaria, y también tienen una gran importancia para el desarrollo y progreso de la sociedad. Con el desarrollo de la nanotecnología, el microrobot/nanobot (microrobot/nanobot) se ha convertido gradualmente en un tema candente de investigación, y pueden operar a escala de micras o incluso nanómetros. Debido al pequeño tamaño de estos robots, que se encuentran solo a nivel de micras o nanómetros, pueden entrar en espacios más confinados y también pueden formar grupos para trabajar juntos y realizar tareas específicas.

01 Microrrobots y Nanorrobots
Con el rápido desarrollo de la tecnología robótica, los robots se utilizan cada vez más ampliamente en la vida diaria, y también son de gran importancia para el desarrollo y el progreso de la sociedad. Con el desarrollo de la nanotecnología, el microrrobot/nanorobot se ha convertido gradualmente en un punto de interés para la investigación, y pueden operar a escala de micras o incluso nanómetros. Debido al pequeño tamaño de estos robots, que solo están a nivel de micras o nanómetros, pueden entrar en espacios más confinados y también pueden formar grupos para trabajar juntos para lograr tareas específicas.
02 Microrrobots cargados con células madre
Las células madre con potencial de diferenciación se han utilizado ampliamente en la investigación para el tratamiento de enfermedades. La terapia con células madre es un tratamiento prometedor para reparar daños en tejidos u órganos, y las células pueden detectar y responder activamente a las enfermedades con menos efectos secundarios en el cuerpo que la quimioterapia pasiva. Sin embargo, todavía existen desafíos en la administración de células madre funcionales al sitio de la enfermedad, y si se utilizan demasiadas células, existe el riesgo de una respuesta inmunitaria excesiva debido a la sobreproducción de citocinas.
Este método de administración preciso aumentará la eficacia y reducirá los efectos secundarios de la terapia con células madre con microrrobots especialmente diseñados que pueden cargar células madre y administrarlas a áreas específicas, especialmente tejidos o cavidades de difícil acceso con dosis terapéuticas convencionales.
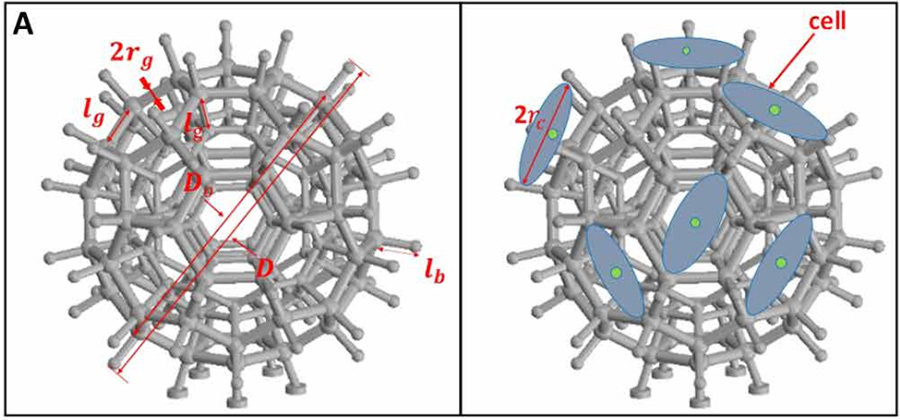
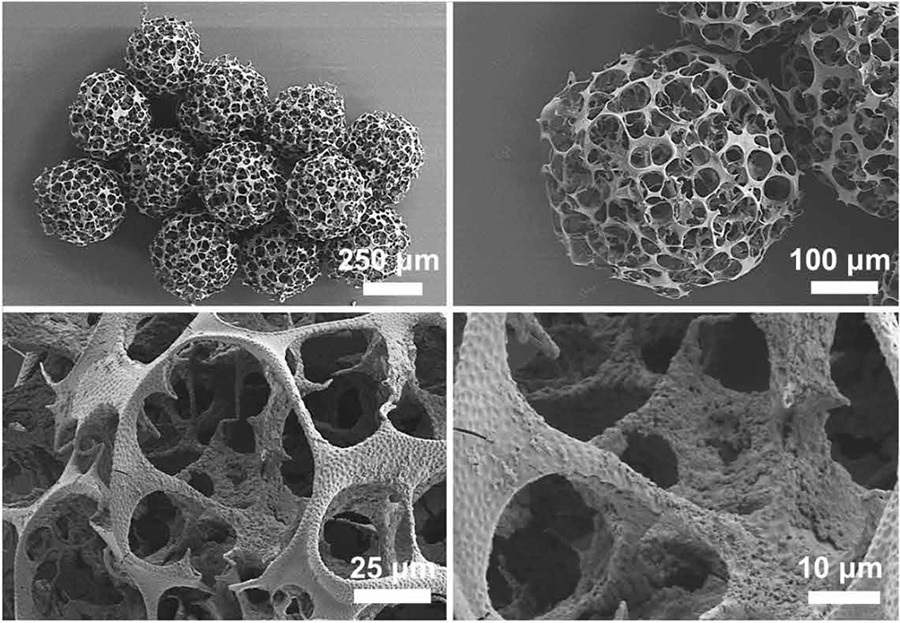
Un equipo de investigación de la City University de Hong Kong ha utilizado la litografía láser 3D para construir un andamio celular como un microrrobot con una estructura esférica porosa similar a una rebaba y capacidad de respuesta al campo magnético para el transporte de células dirigido in vivo. Este microrobot tiene parámetros estructurales ajustables que se pueden adaptar al tamaño de las células cargadas para lograr una mejor eficiencia de carga.
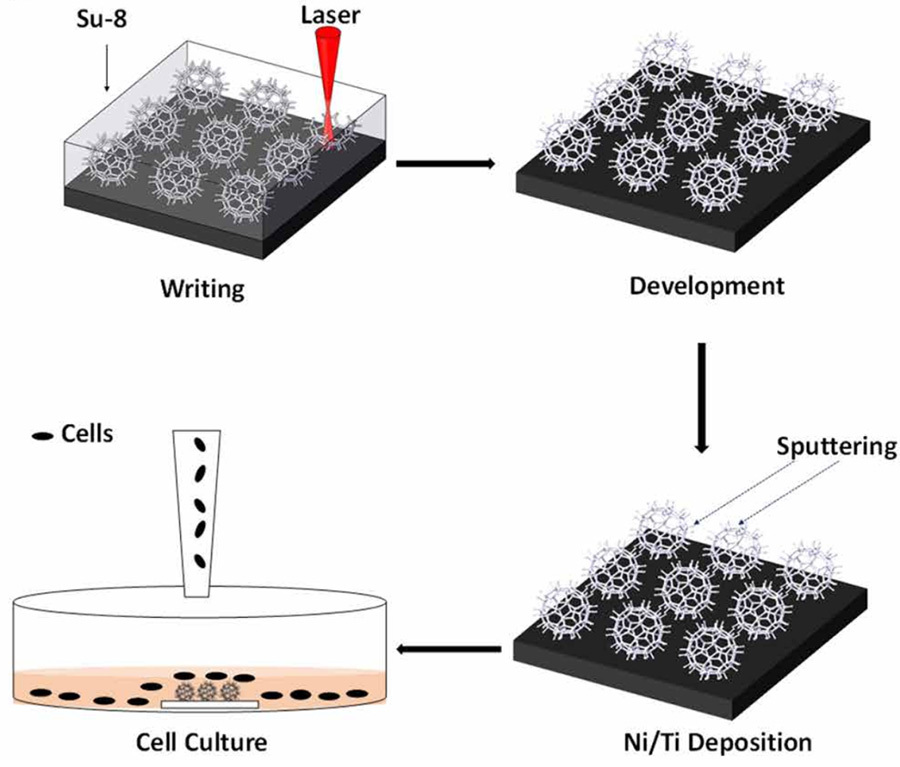
El microrrobot se preparó utilizando litografía 3D: la fotorresistencia negativa SU-8 se recubrió por centrifugación sobre una oblea de vidrio a una velocidad de rotación adecuada, se precalentó y se enfrió a temperatura ambiente, la estructura se escribió utilizando el sistema de impresión 3D micro y nano de dos fotones nanocribe, y después del grabado, se rociaron recubrimientos de níquel y titanio de alta pureza para obtener el microrrobot deseado.
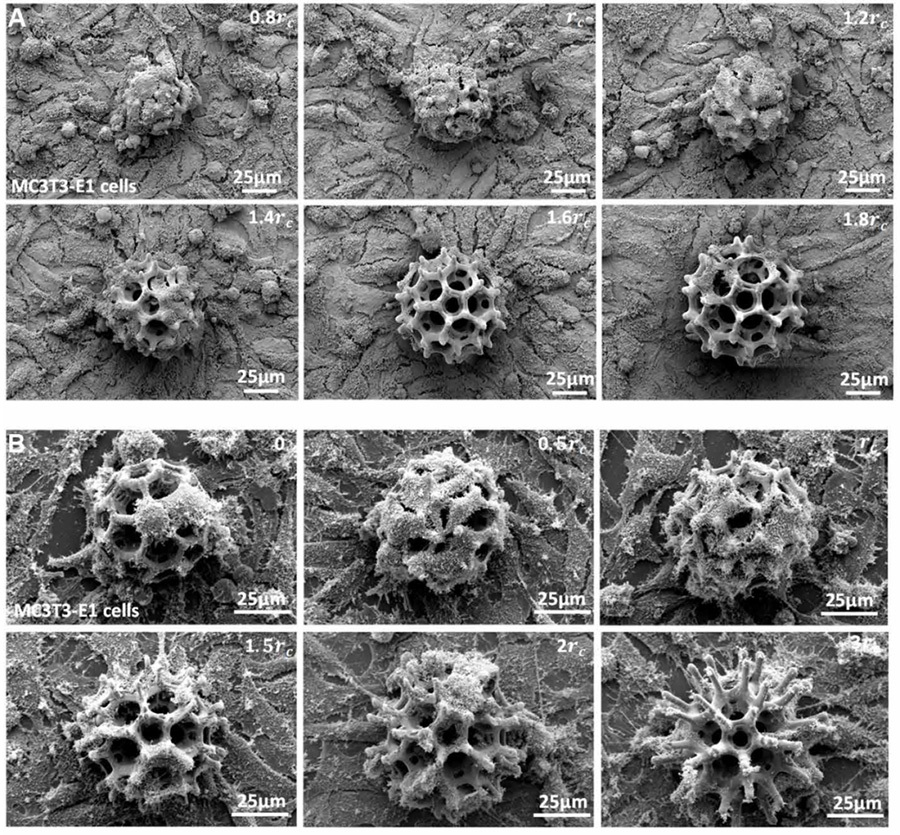
Cuando la longitud de la cuadrícula del andamio es similar al tamaño de la célula, su capacidad para cargar células es la mayor. Los investigadores cocultivaron osteoblastos embrionarios de ratón MC3T3-E1 y células madre mesenquimales (MSC) con el microrrobot, respectivamente, y obtuvieron microrrobots cargados con dos tipos de células ajustando los parámetros de diseño, en los que el diámetro del robot cargado con células MC3T3-E1 fue de aproximadamente 70 μm, y el del cargado con MSC fue de aproximadamente 90 μm. Los resultados de los experimentos de viabilidad celular mostraron que el robot no tenía toxicidad significativa para las células MC3T3-E y las MSC.
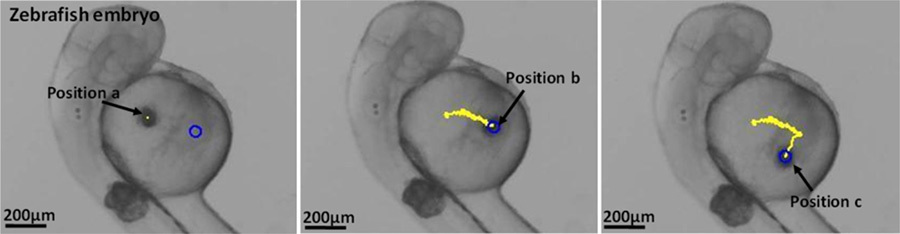
Posteriormente, los investigadores realizaron experimentos de respuesta magnética ex vivo e in vivo con los microrrobots. En experimentos con embriones de pez cebra, se observó claramente que el robot cargado con MSC se movía en respuesta al campo magnético, con la velocidad de movimiento proporcional al gradiente del campo magnético.
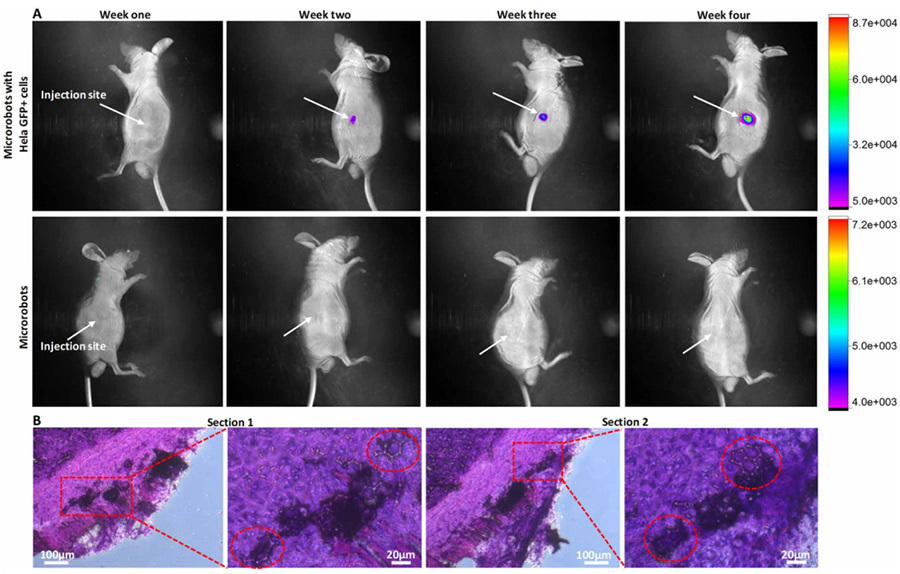
Finalmente, los investigadores realizaron experimentos in vivo con ratones desnudos para verificar que los microrrobots podían liberar células cargadas, utilizando células HeLa marcadas con proteína fluorescente verde para facilitar la observación. Se inyectaron microrrobots cargados con células HeLa en la parte posterior izquierda de los ratones desnudos, mientras que se inyectaron microrrobots sin células en la parte posterior derecha como control, y después de 4 semanas de incubación se observó un aumento de la fluorescencia en la parte posterior izquierda de los ratones, mientras que no se observó fluorescencia en la parte posterior derecha. Los resultados histológicos revelaron además que todos los microrrobots inyectados se ubicaban en el borde del tumor, lo que indica que el tumor estaba formado por células HeLa liberadas por los microrrobots.
Este estudio construyó con éxito microrrobots correspondientes magnéticamente que se pueden cargar con diferentes tipos de células, que no tienen citotoxicidad significativa y pueden liberar las células cargadas en el sitio objetivo, la limitación de este estudio es que los materiales utilizados no son biodegradables, lo que tiene limitaciones para su aplicación in vivo.
03 Microrrobots biodegradables para el tratamiento de defectos de cartílago
Un equipo de investigadores de Corea del Sur ha construido un andamio celular adecuado para cargar MSC y degradable in vivo. Los investigadores utilizaron ácido poliláctico-hidroxiacético (PLGA) para fabricar el microandamio y adsorbieron quitosano y ferumoxitol magnético en su superficie para construir el microrrobot. Los resultados de los experimentos de proliferación celular mostraron que este microrrobot no afectó la tasa de proliferación celular.
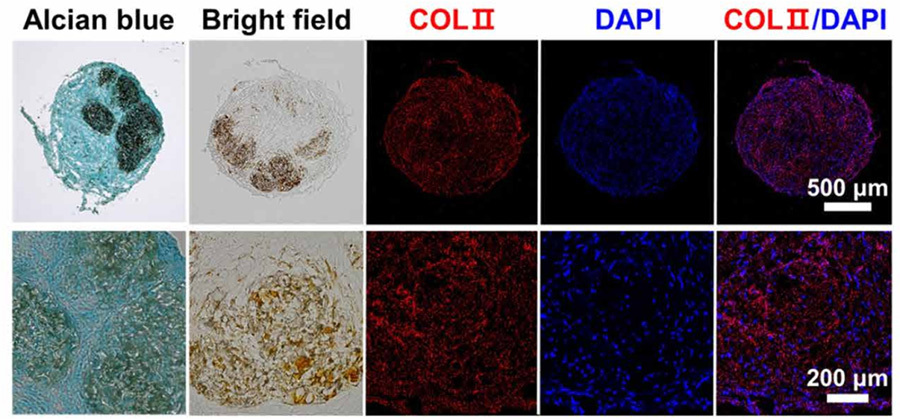
Para evaluar si este microrrobot es adecuado para la regeneración del cartílago, los investigadores cargaron células madre mesenquimales de médula ósea humana en el microrrobot y las cultivaron en un medio de diferenciación inducida por cartílago durante 21 días. Posteriormente, se evaluó la diferenciación osteogénica de las células madre mediante tinción con azul de Alcian e inmunofluorescencia de colágeno tipo II, lo que mostró que las células madre cargadas en el microrobot se diferenciaron con éxito en condrocitos, lo que les da el potencial de aplicarse a la reparación del cartílago.
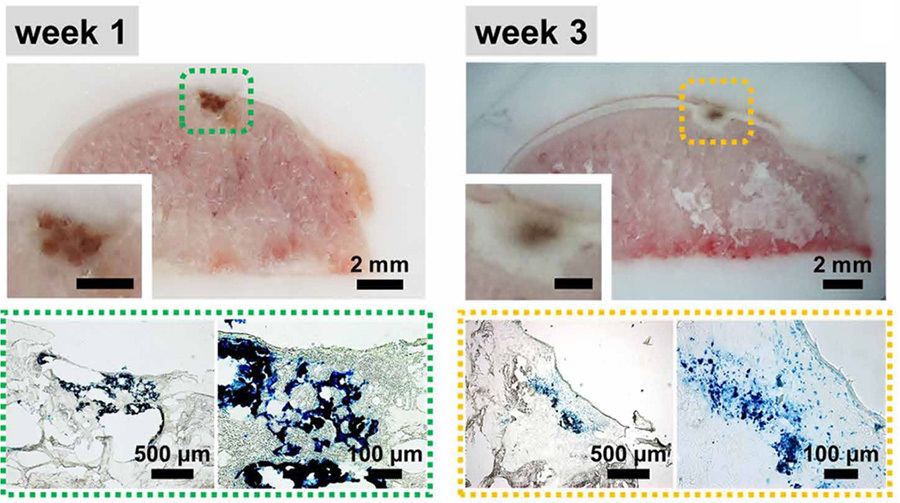
Los investigadores aplicaron además los microrrobots cargados con células madre a los experimentos de regeneración de cartílago en las articulaciones de la rodilla de conejo, y en la tercera semana del tratamiento, se pudo observar que el sitio de la lesión se redujo significativamente, y se pudo observar la degradación gradual de los microrrobots mediante tinción con azul de Prusia, mientras que los resultados del ensayo de distribución del cartílago mostraron que las MSC cargadas no desaparecieron junto con la degradación de los microrrobots, y se implantaron en el sitio de la lesión del cartílago, lo que tuvo un efecto significativo en la inflamación. Las mediciones de la expresión de los factores IL-1β, IL-6, IL-8 y TNF-α en la sinovia, el líquido sinovial, los ganglios linfáticos y el bazo no mostraron diferencias significativas entre el grupo de tratamiento con microrrobot y el grupo de control, lo que sugiere que el microrrobot no causa una respuesta inflamatoria.
En este estudio, se construyó un microrrobot magnético para cargar MSC utilizando materiales biodegradables, y se verificó experimentalmente su efectividad en el tratamiento de defectos de cartílago en las articulaciones de la rodilla de conejo. El uso del microrrobot puede maximizar el número de células madre en el sitio objetivo y la eficiencia de diferenciación en comparación con el método de inyección tradicional, pero a pesar de esto, todavía queda un largo camino por recorrer para una mayor aplicación clínica, y se necesita el desarrollo de un dispositivo de inyección que pueda usarse para inyectar el microrrobot de manera estable, así como el desarrollo de un dispositivo de inyección que pueda usarse para inyectar el microrrobot de manera estable. Sin embargo, su aplicación clínica posterior aún tiene un camino por recorrer, requiriendo el desarrollo de un dispositivo de inyección que pueda estabilizar el microrrobot, así como el desarrollo de un dispositivo de campo magnético adecuado para el uso humano.
En la última década, aproximadamente, la aplicación de microrrobots y nanorrobots en medicina ha logrado cierto grado de avances, y se han hecho nuevos descubrimientos en diferentes campos, sin embargo, todavía hay muchos desafíos que afrontar antes de que puedan traducirse en aplicaciones clínicas, y la estructura de los microrrobots y nanorrobots todavía tiene mucho margen de mejora, y el método de accionamiento de la microrrobótica y nanorrobótica todavía necesita continuar optimizándose, pero la perspectiva de la aplicación de la microrrobótica y nanorrobótica en la medicina de precisión es bastante amplia, y su potencial de uso en el diagnóstico y tratamiento de enfermedades es inmenso. Sin embargo, la perspectiva de la microrrobótica y la nanorrobótica en la medicina de precisión es bastante amplia, y su aplicación en el diagnóstico y tratamiento de enfermedades tiene un gran potencial, lo que cambiará significativamente la vida humana una vez que la tecnología relacionada pueda aplicarse de manera madura al cuerpo humano.
INFORMACIÓN DE SUSCRIPCIÓN
¡Te enviaremos información en tiempo real regularmente!
Grupo de tecnología médica de Guangxi Huaren Co., Ltd.
Dirección: 15th Floor, Building A, Biyuan Center, Wuxiang New District, Nanning City, China (Guangxi) Pilot Free Trade Zone

Tecnología médica de Huaren
Investigación médica de Huaren
Hua Ren Cell dijo